
近日,工學院研究團隊在工業信息領域頂級期刊《IEEE Transactions on Industrial Informatics》(一區TOP)發表題為“Stabilizing a Class of Periodical Time-Delay Milling Systems by Adaptive Active Control Method”的研究論文。
周期性時滯廣泛存在于工業制造過程中,但其時變特性與延遲效應為控制器設計與系統分析帶來挑戰。該研究通過將自激振動系統動力學轉化為傅里葉級數描述的時不變不確定模型,結合LaSalle-Yoshizawa定理,設計了自適應主動控制策略。通過數值案例研究,團隊驗證了該方法可將系統穩定區域邊界大幅擴展,尤其在高速、大軸向銑深工況下表現突出。結果表明,所設計的控制方案在延遲時間τ∈[1.9,2.1] ms范圍內,能有效抑制自激振動,使系統穩定區域面積顯著超越傳統μ綜合控制法及平均值逼近法。同時,研究揭示了在高速銑削及變工況場景下,系統穩定性對控制器設計的敏感性,進一步凸顯了自適應方法的工程適用性。
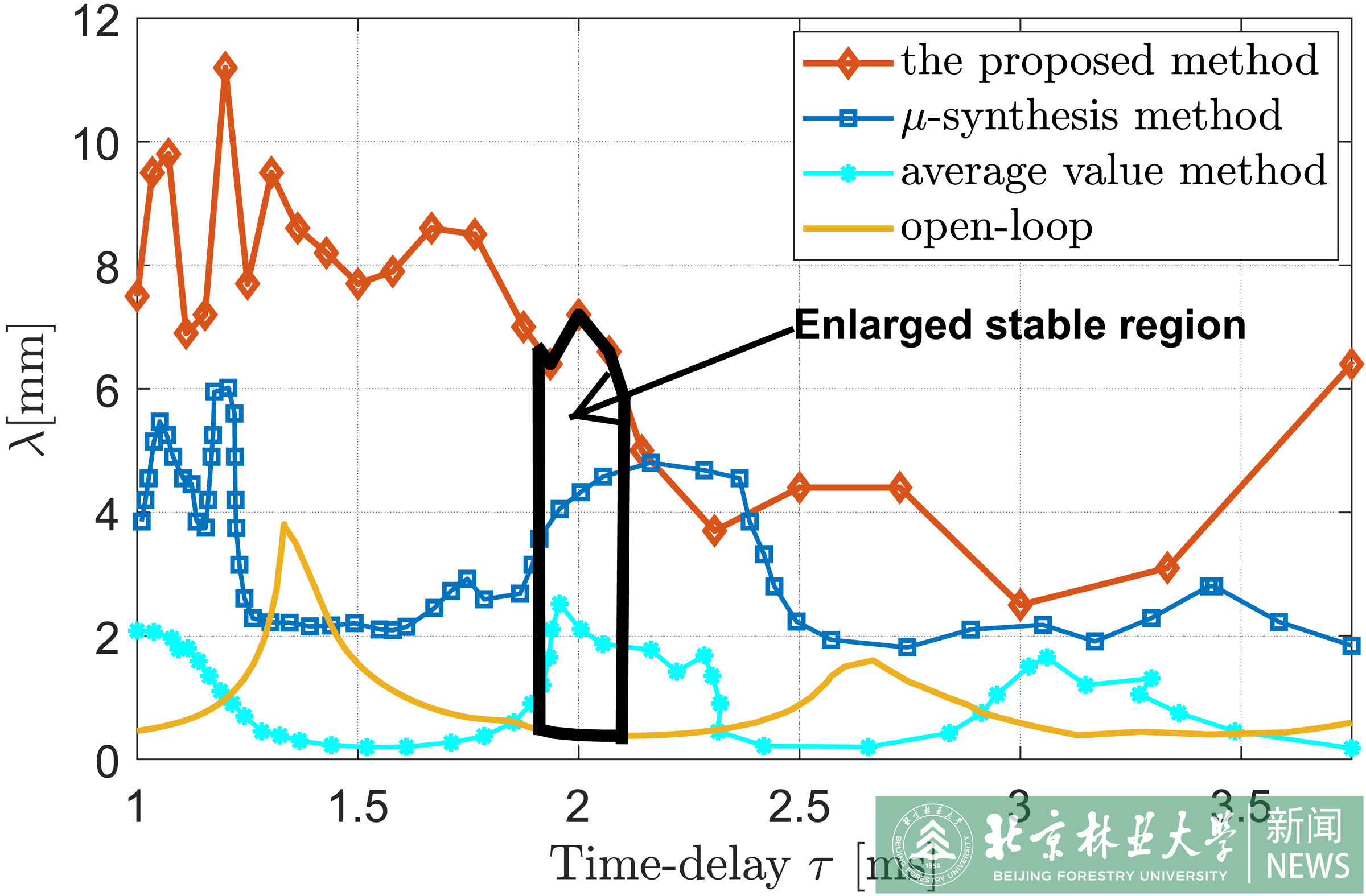
閉環穩定葉瓣圖(SLD)
該成果突破了傳統固定結構控制器在高階與時變場景下的局限性,實現了周期性時滯系統的高魯棒性控制。
本研究的第一作者為北京林業大學工學院吳越副教授,北京林業大學為第一完成單位,華中科技大學人工智能與自動化學院的張海濤教授為文章的通訊作者。該工作得到了國家自然科學基金(項目編號:62225306、62273053)等聯合資助。