
近日,工學院闞江明教授課題組完成的“BASL-AD SLAM: a robust deep-learning feature-based visual SLAM system with adaptive motion model”論文在工程技術領域Top期刊《IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS》(中國科學院一區TOP,IF="8.5)上發表,論文第一作者為工學院博士研究生韓軍宇,第一通訊作者為董蕊芳副教授,第二通訊作者為闞江明教授,北京林業大學為文章第一完成單位,文章主要信息如下:
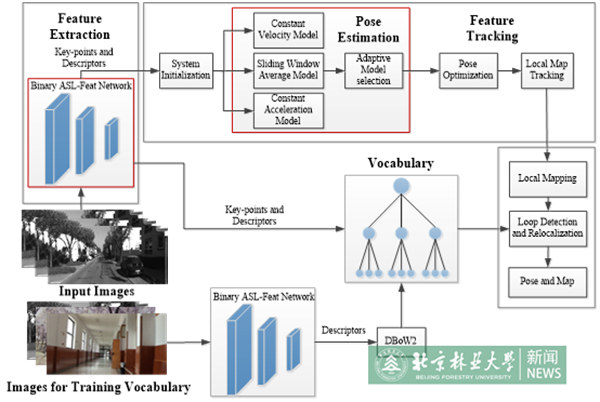
同步定位與建圖簡稱SLAM,是機器人進行自主作業的前提。目前,基于視覺的SLAM是機器人實現自主導航的一種重要方式。當機器人面對如林區環境這樣光照變化明顯、地勢復雜且紋理相似等場景,傳統的視覺SLAM系統常出現特征匹配失敗和精度下降等問題。為解決此問題,本研究對圖像特征和運動模型進行研究。一方面提出Binary ASL-Feat網絡提取圖像特征和二進制描述符進行特征匹配,提高圖像特征匹配的精度和魯棒性;另一方面在恒速模型基礎上增加恒加速模型與滑動平均模型,提出自適應模型選取最優相機初始位姿,提高視覺SLAM系統輸出軌跡的精度。通過實驗對比可知,本研究提出的BASL-AD SLAM系統在面對林區等復雜環境時依然可穩定的輸出稀疏軌跡地圖,且保持在良好的精度范圍內,為后續智能機器人的自主作業提供依據。
該項工作得到了國家自然科學基金項目(62203059)和中央高校基本科研業務費資助(2021ZY72)等項目的資助。
文章鏈接:https://ieeexplore.ieee.org/document/10475131