
近期,信息學院羅傳文團隊在無線可充電傳感器網(wǎng)絡領域取得了重要突破,研究成果以“Dynamic Charging Strategy Optimization for UAV-Assisted Wireless Rechargeable Sensor Networks Based on Deep Q-Network”為題,在物聯(lián)網(wǎng)領域國際頂級期刊《IEEE Internet of Things Journal》(中國科學院一區(qū),IF=10.6)上發(fā)表。
無線可充電傳感器網(wǎng)絡在精準農(nóng)業(yè)、城市公交系統(tǒng)等領域有著廣泛的應用前景。在這個網(wǎng)絡中,可充電傳感器能夠監(jiān)測環(huán)境,收集信息,并通過無線通信實現(xiàn)數(shù)據(jù)交互。然而,傳感器的電池壽命一直是限制網(wǎng)絡連續(xù)運行和整體性能的關(guān)鍵。更換電池不僅耗時耗力,而且成本高昂。因此,如何有效延長傳感器壽命,成為了無線可充電傳感器網(wǎng)絡研究中的一項重要課題。
為了解決傳感器能量限制問題,研究人員提出了一種利用無人機為無線可充電傳感器網(wǎng)絡充電的方案。憑借無人機的高機動性和靈活的部署能力,它能夠自由地在無線可充電傳感器網(wǎng)絡上空移動,并通過無線能量發(fā)射器遠程為傳感器節(jié)點進行能量補充。然而,無人機的充電策略設計面臨著諸多挑戰(zhàn),包括如何適應傳感器能耗的實時動態(tài)變化、如何在保證傳感器能量需求的同時優(yōu)化無人機的能量消耗等。
針對上述問題,本文考慮在監(jiān)控區(qū)域部署無人機和移動多功能車輔助下的無線可充電傳感器網(wǎng)絡架構(gòu)(圖1)。在該架構(gòu)中,無人機作為移動充電器為傳感器補充能量,而移動多功能車則作為移動基站為能量不足的無人機更換電池。研究團隊關(guān)注的核心問題是如何最小化傳感器死亡時間和無人機能量消耗(MDME),以確保網(wǎng)絡的持續(xù)穩(wěn)定運行。為了實現(xiàn)這一目標,研究團隊提出了一種基于深度強化學習的DQN-MDME算法(圖2)。該算法能夠根據(jù)實時網(wǎng)絡狀態(tài)進行在線充電調(diào)度決策,并通過經(jīng)驗重放機制不斷更新網(wǎng)絡參數(shù)。實驗結(jié)果表明,該算法在降低傳感器死亡時間和無人機能耗方面表現(xiàn)出色,顯著優(yōu)于其他三種經(jīng)典算法。
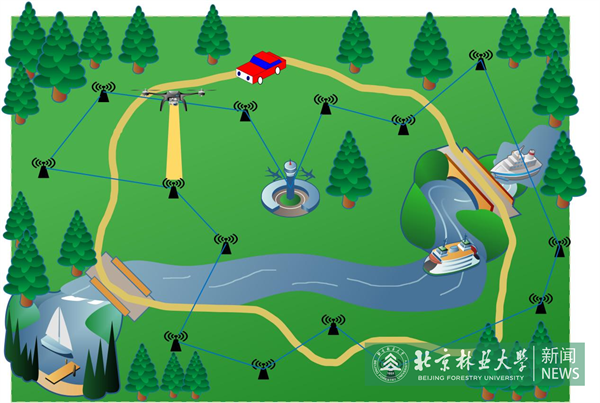
圖1 無線可充電傳感器網(wǎng)絡架構(gòu)圖
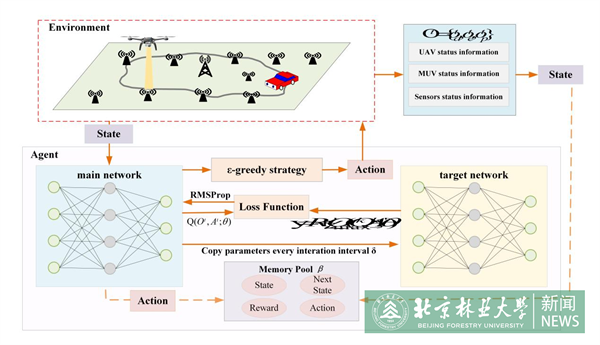
圖2 DQN-MDME算法流程圖
本論文第一作者為信息學院(人工智能學院)2021級碩士研究生劉寧,通訊作者為羅傳文,北京林業(yè)大學為唯一完成單位;本論文受到國家自然科學基金項目(62202054、62002022、32071775) 資助。
論文鏈接:https://ieeexplore.ieee.org/abstract/document/10368020